特性:基于计算机控制、各臂手油缸实现速度可控。
用途:水电站水轮机叶片组装;风电轮毂组装;矿业重卡轮胎组装;石化大型管道法兰螺栓拆装;汽轮机大型螺栓拆装;可定制适配液压扭矩扳手、拉伸器,进行螺栓预紧及拆卸作业。






特性:基于计算机控制、各臂手油缸实现速度可控。
用途:水电站水轮机叶片组装;风电轮毂组装;矿业重卡轮胎组装;石化大型管道法兰螺栓拆装;汽轮机大型螺栓拆装;可定制适配液压扭矩扳手、拉伸器,进行螺栓预紧及拆卸作业。
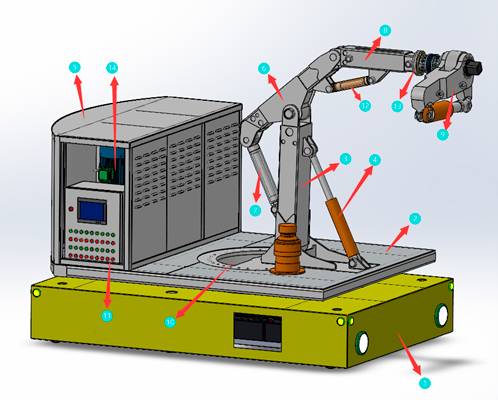
该叶片螺栓拆装设备以"省时、省力、可靠、安全、易用"为设计宗旨,采用多自由度协同作业系统:
移动系统:AGV小车搭载舵轮驱动,可实现原地360°旋转及全向行走,通过舵轮转向或底盘转盘旋转实现设备左右位置调整;
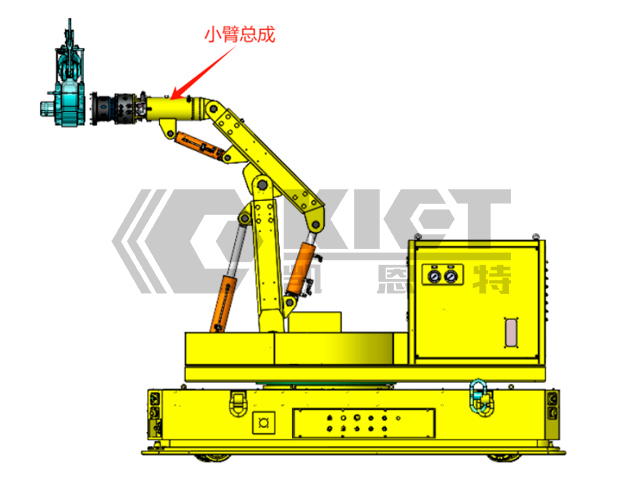
机械臂系统:大臂、中臂、小臂三轴联动,支持扭力扳手六自由度姿态调节(左右/高低/远近),其中小臂专用于调平扭力扳手与螺栓孔的平行度;
扭矩作业系统:液压马达驱动扭力扳手旋转定位,配合伸缩随动臂实时补偿螺栓拆装过程中的轴向位移,确保作业连续性。
整套系统通过模块化运动机构实现空间精准定位与自适应调整,兼顾操作灵活性与作业安全性。
● 传递能量可靠:液体可以在密闭管路中传递能量,在传递过程中不会产生损耗,传递效率高,能够保证系统的可靠性。
● 承受压力能力强:液压系统可以承受很高的压力,可以实现大功率传动和大吨位的传递。
● 精度高:由于液压系统传递能量的精度高,所以它在一些需要精确运动的领域,如数控机床、飞行器、航天器等,得到广泛应用。
● 工作稳定:由于液压系统的传递能量稳定,所以在工作过程中不会产生明显的震动和噪声,工作过程相对平稳。
● 易于控制:液压系统的流量控制和压力控制非常容易,可以通过调节电磁阀和油泵等进行精确的控制。
● 结构简单:液压系统的结构相对简单,不需要太多的部件和连接方式,所以维护和保养工作较为简单。
● 多向移动能力:AGV小车可以在不掉头的情况下,做到前后左右360°任意方向移动,并且可以在原地完成360度旋转,机动性强。
● 稳定性好:AGV小车多轮组各自独立,能够自适应地面,行动过程稳定,不易发生翻转。
● 操作简单:AGV小车整体控制简单,能够通过遥控器、手机应用程序等方式进行远程遥控,操作方便。
● 适应场地:AGV小车适用于各种场景,其中就包括施工现场,用于移动搬运扭矩扳手。行走轮组可装备防滑驱动轮,可以让AGV在潮湿、积水、油污、极光滑地面等各种特殊地面上稳定行驶,解决打滑现象,防滑驱动轮与地面的附着系数比一般驱动轮高50%以上,从而保证AGV在各种负载下能够提供足够的牵引能力,不跑偏、不打滑。
● 为了实现现场操作设备的便携性,设备开发有手持式无线操作手柄,该手柄功能件与设备成套开发,智能化程度高。
● AGV无线遥控器。
● AGV有线遥控器。

叶片螺栓拆装设备主要技术参数:
AGV小车技术参数:

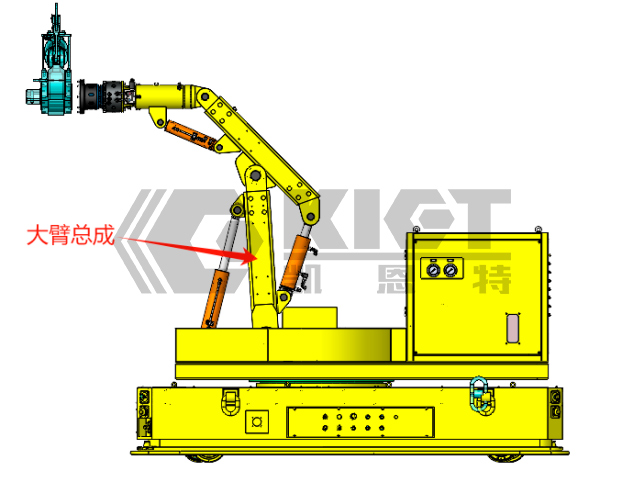
大臂总成技术参数:
小臂油缸技术参数:
液压扳手技术参数: